Difference between revisions of "High dynamic range torque control"
| [checked revision] | [checked revision] |
(→Contributions) |
|||
| (One intermediate revision by the same user not shown) | |||
| Line 1: | Line 1: | ||
| − | [[File:Noise1.gif| | + | [[File:Noise1.gif|350px|thumb|All measured signals differ more or less from the true physical value (general example image). HDRT aims to minimize error and noise of measured motor phase currents by adjusting current sensor sensitivity by the means of a low noise amplifier prior to analog-to-digital conversion.]] |
'''Torque control''' is the most important single instrument present in modern motor drives. All operations drive does, are handled finally by a torque controller - even if motor is being operated in velocity or positioning modes. | '''Torque control''' is the most important single instrument present in modern motor drives. All operations drive does, are handled finally by a torque controller - even if motor is being operated in velocity or positioning modes. | ||
| − | High dynamic range torque control a.k.a. '''HDRT''' is a torque control technology built in [[VSD-E and VSD-XE|VSD-E/XE series]] | + | High dynamic range torque control a.k.a. '''HDRT''' is a torque control technology built in [[VSD-E and VSD-XE|VSD-E/XE series]], [[Argon (servo drive)|Argon servo drive series]] as well as ION drive series. HDRT yields approximately 14 bits of torque resolution which is 16 times higher compared to standard 10 bit torque resolution found from an average drive. HDRT has been implemented by using on-the-fly adjusting current sensor gain control combined with low noise electronics and at least 16 bit digital signal path inside the drive. |
| − | ==Contributions== | + | ===Contributions=== |
*Smoother, less jittering motion when combined with high resolution [[Feedback devices|feedback]] | *Smoother, less jittering motion when combined with high resolution [[Feedback devices|feedback]] | ||
*Quieter operation, reduced noise from motor | *Quieter operation, reduced noise from motor | ||
*Allow supporting wide power range of motors within single drive | *Allow supporting wide power range of motors within single drive | ||
*All automatic & transparent - no configuration needed | *All automatic & transparent - no configuration needed | ||
| + | ==How does HDRT work== | ||
| + | HDRT is mainly based on high precision current sensing of motor coils. Motor coil current sensing is one of the most critical component in a well behaving motor drive. This is true because current readout data is being used as feedback signal for closed loop torque controller as motor torque is directly proportional to coil currents. The importance of good torque control can be understood by knowing the fact that the the final step in drive’s signal path is always a torque controller. This means, any error in current sensing will eventually reflect to motor shaft, no matter which control mode is being used. | ||
| + | One major motivator behind HDRT is to expand the range of motors that can be driven with single drive without exhibiting any of the typical drawbacks that come when a small motor is being driven with a large drive (motor hiss, jitter, torque ripple, position hunting). It also gives maximum precision for those who want the best performance in torque control mode. | ||
| + | |||
| + | <gallery widths="450px" heights="360px"> | ||
| + | File:Hdrtboth annotated.png|Illustration of measured current signals from ION. Each phase current is measured in two channels: with high sensitivity and low sensitivity. The high sensitivity signal has higher precision but is limited to about +/-3.5A range. The low sensitivity signal has range of +/-23A but comes with less precision. The drive combines these two signals into one by making it both precise and high dynamic range. | ||
| + | File:Hdrtcombm.png|Zoomed image of the combined current sense signal. The switch between high and low sensitivity happens at 2.5A. As seen from the image, the curve above 2.5A is bit more rough than below 2.5A. | ||
| + | </gallery> | ||
[[Category:Technology]] | [[Category:Technology]] | ||
[[Category:Glossary]] | [[Category:Glossary]] | ||
Latest revision as of 12:11, 15 September 2014

Torque control is the most important single instrument present in modern motor drives. All operations drive does, are handled finally by a torque controller - even if motor is being operated in velocity or positioning modes.
High dynamic range torque control a.k.a. HDRT is a torque control technology built in VSD-E/XE series, Argon servo drive series as well as ION drive series. HDRT yields approximately 14 bits of torque resolution which is 16 times higher compared to standard 10 bit torque resolution found from an average drive. HDRT has been implemented by using on-the-fly adjusting current sensor gain control combined with low noise electronics and at least 16 bit digital signal path inside the drive.
Contributions[edit | edit source]
- Smoother, less jittering motion when combined with high resolution feedback
- Quieter operation, reduced noise from motor
- Allow supporting wide power range of motors within single drive
- All automatic & transparent - no configuration needed
How does HDRT work[edit | edit source]
HDRT is mainly based on high precision current sensing of motor coils. Motor coil current sensing is one of the most critical component in a well behaving motor drive. This is true because current readout data is being used as feedback signal for closed loop torque controller as motor torque is directly proportional to coil currents. The importance of good torque control can be understood by knowing the fact that the the final step in drive’s signal path is always a torque controller. This means, any error in current sensing will eventually reflect to motor shaft, no matter which control mode is being used.
One major motivator behind HDRT is to expand the range of motors that can be driven with single drive without exhibiting any of the typical drawbacks that come when a small motor is being driven with a large drive (motor hiss, jitter, torque ripple, position hunting). It also gives maximum precision for those who want the best performance in torque control mode.
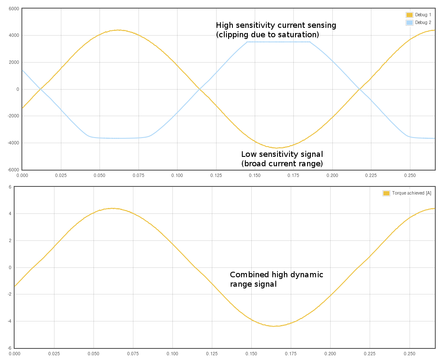
Illustration of measured current signals from ION. Each phase current is measured in two channels: with high sensitivity and low sensitivity. The high sensitivity signal has higher precision but is limited to about +/-3.5A range. The low sensitivity signal has range of +/-23A but comes with less precision. The drive combines these two signals into one by making it both precise and high dynamic range.
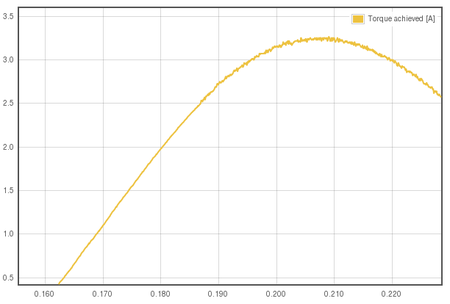
Zoomed image of the combined current sense signal. The switch between high and low sensitivity happens at 2.5A. As seen from the image, the curve above 2.5A is bit more rough than below 2.5A.

