The goal of this project is to create a full featured precision positioning servo drive board. It has been especially designed for 3 phase AC servomotors but it will also handle BLDC or brushed DC motors as well. The goal is no less than industrial quality drive which utilizes the most efficient control methods like Flux Vector Control, PID feedback loop with feedforward branches.
Target power range is about 1 kW maximum continuous output power. The board has differential encoder interface to deal with high resolution quadrature encoders. The board can be equipped with varying MOSFET/IGBT devices to adapt on different voltage ranges.
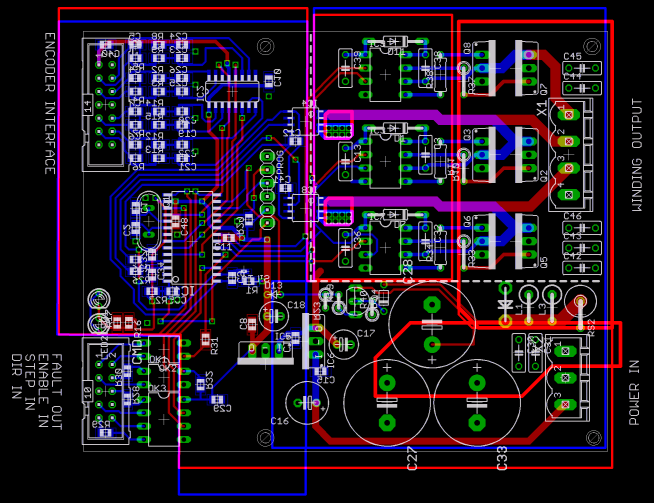
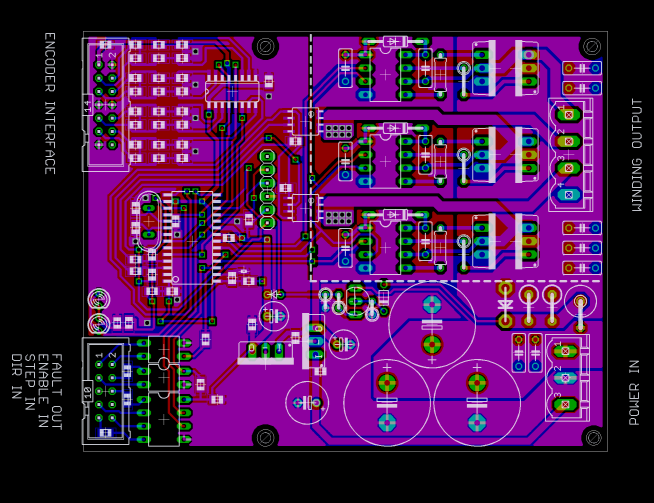
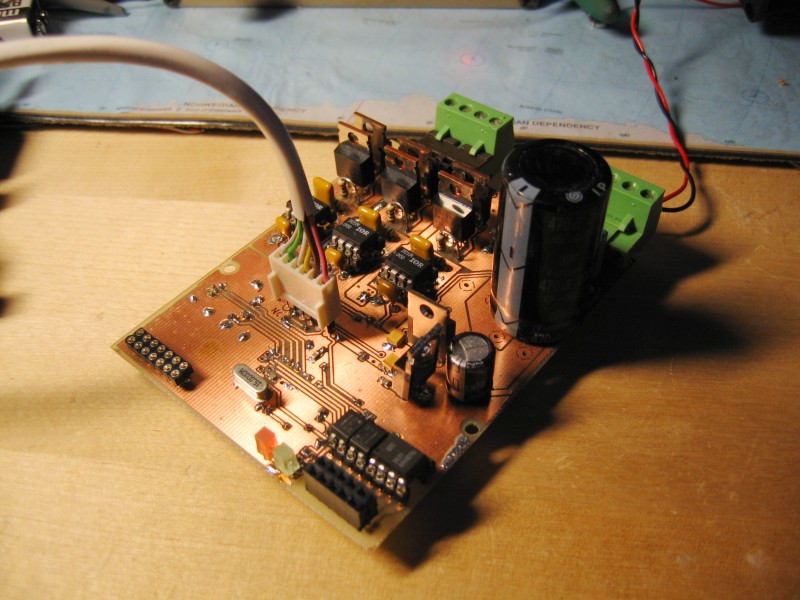
Currently the drive is in heavy devepoment phase. The schematcs and layout are mostly finished and I already have a proto board for software development. The present status of the software is where it successfully drives AC servo as positioning actuator.