Difference between revisions of "Argon user guide/Motor compatibility"
| [checked revision] | [checked revision] |
| (9 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
| − | This is a short guide for determining whether or not a motor is suitable for Argon. | + | [[File:Servomotor and feedback.png|thumb|Typical servo motor with encoder feedback]]This is a short guide for determining whether or not a motor is suitable for Argon. |
| − | + | ==Compatibility guide== | |
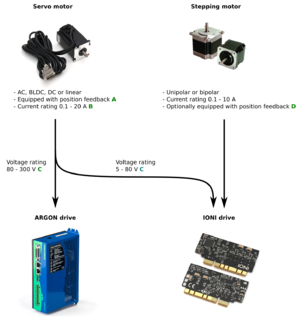
| − | + | [[File:drive_selection_by_motor.png|300px|thumb|link=Motor compatibility guide|See the recommended [[Motor compatibility guide]]]] For overview of motor compatibility with visual illustrations, see [[Motor compatibility guide]]. | |
| − | *Permanent magnet brushed DC | + | ===Compatible motor technologies=== |
| − | *Permanent magnet brushless DC (BLDC) | + | [[motor types|Motor type]] must be one of the following (either rotary or linear): |
| − | *Permanent magnet AC | + | *Permanent magnet brushed DC |
| − | + | *Permanent magnet brushless DC (BLDC) (magnetic pole count 2 to 100) | |
| − | Servomotors must be equipped with an compatible [[ | + | *Permanent magnet AC (magnetic pole count 2 to 100) |
| − | *2 channel encoder is | + | ===Compatible feedback devices=== |
| − | *Index channel is not required but is supported for precise homing | + | Servomotors must be equipped with an compatible [[feedback devices]]. |
| + | ====Encoders==== | ||
| + | If motor is equipped with '''encoder''', following types are compatible: | ||
| + | *Incremental [[quadrature]] output type | ||
| + | *Supply voltage 5V | ||
| + | *Single ended or differential wiring | ||
| + | *2-channel encoder is sufficient for all motor types (index channel and hall sensors are optional) | ||
| + | *Suitable encoder resolutions range from about 100 PPR to 131070 PPR (pulses or lines per revolution) | ||
| + | *Index channel is not required but is supported for precise [[homing]] | ||
*Hall or commutation sensors are not required but are supported for AC/BLDC motors | *Hall or commutation sensors are not required but are supported for AC/BLDC motors | ||
| − | |||
| − | Motor '''voltages''' and '''currents''' can introduce some limitations to motor output speed and torque but | + | More than 99% if incremental encoders used today are directly compatible with Argon. |
| + | =====Limited compatibility encoders===== | ||
| + | *Serial data communication based encoders are not currently supported. However if the serial encoder also provides incremental signal outputs, then it can be used as standard incremental encoder with Argon. | ||
| + | *Analog (SinCos) encoder support is partial. At the present mode analog SinCos encoder with 1Vpp output can be connected just like incremental encoder. However at the present state drive will not perform interpolation of analog signal thus not yielding maximum obtainable resolution. The resolution of analog encoder will be the encoder line count multiplied by 4. | ||
| + | |||
| + | ====Resolvers==== | ||
| + | Argon supports resolver a.k.a. synchro type feedback devices through [[Argon resolver adapter]] device. Due to wide variety of electrical properties of resolvers it is difficult to guarantee optimal operation with all resolvers. However, Argon resolver adapter has been designed to work with typical resolvers that come inside servo motors. | ||
| + | ===Motor power rating=== | ||
| + | Motor '''voltages''' and '''currents''' can introduce some limitations to motor output speed and torque but will not cause unsuitability. | ||
*'''Motor voltage''' is the limiting factor for maximum speed. For example, if you have a 200 VDC brushed DC servo motor and run it at 115 VAC using Argon, then you can expect to get a speed of 115*1.41*88%*/200V = 71% of motor's rated speed. 88% comes from Argon's effective voltage swing at power outputs (see [[Argon specifications]]). | *'''Motor voltage''' is the limiting factor for maximum speed. For example, if you have a 200 VDC brushed DC servo motor and run it at 115 VAC using Argon, then you can expect to get a speed of 115*1.41*88%*/200V = 71% of motor's rated speed. 88% comes from Argon's effective voltage swing at power outputs (see [[Argon specifications]]). | ||
*'''Motor current''' is the limiting factor for maximum torque. For example, if you have motor rated for 20A DC and drive's maximum output is 10A DC, then you get 50% of the rated torque. | *'''Motor current''' is the limiting factor for maximum torque. For example, if you have motor rated for 20A DC and drive's maximum output is 10A DC, then you get 50% of the rated torque. | ||
| + | ====Smallest suitable motors==== | ||
| + | Argon has [[High dynamic range torque control|high dynamic range torque control]] which makes it suitable also for very small motors, such as ones with rated current around 300 mA. | ||
| + | |||
| + | ==Need help determining compatibility?== | ||
| + | If not sure whether your motor is compatible, you may ask it through [[Granite Devices support]]. In inquiry please include details: | ||
| + | *Motor and feedback device manufacturer and part numbers | ||
| + | *Motor and feedback device data sheet or web link to specifications | ||
| + | *Feedback device wiring information (which signals are provided by feedback device) | ||
| + | *Motor current and voltage ratings | ||
| − | + | [[Category:Argon_features]] | |
| − | + | [[Category:Argon_user_guide]] | |
| − | [[ | + | |
Latest revision as of 15:21, 28 January 2016
This is a short guide for determining whether or not a motor is suitable for Argon.
Contents
Compatibility guide[edit | edit source]
{kind=link}
Compatible motor technologies[edit | edit source]
Motor type must be one of the following (either rotary or linear):
- Permanent magnet brushed DC
- Permanent magnet brushless DC (BLDC) (magnetic pole count 2 to 100)
- Permanent magnet AC (magnetic pole count 2 to 100)
Compatible feedback devices[edit | edit source]
Servomotors must be equipped with an compatible feedback devices.
Encoders[edit | edit source]
If motor is equipped with encoder, following types are compatible:
- Incremental quadrature output type
- Supply voltage 5V
- Single ended or differential wiring
- 2-channel encoder is sufficient for all motor types (index channel and hall sensors are optional)
- Suitable encoder resolutions range from about 100 PPR to 131070 PPR (pulses or lines per revolution)
- Index channel is not required but is supported for precise homing
- Hall or commutation sensors are not required but are supported for AC/BLDC motors
More than 99% if incremental encoders used today are directly compatible with Argon.
Limited compatibility encoders[edit | edit source]
- Serial data communication based encoders are not currently supported. However if the serial encoder also provides incremental signal outputs, then it can be used as standard incremental encoder with Argon.
- Analog (SinCos) encoder support is partial. At the present mode analog SinCos encoder with 1Vpp output can be connected just like incremental encoder. However at the present state drive will not perform interpolation of analog signal thus not yielding maximum obtainable resolution. The resolution of analog encoder will be the encoder line count multiplied by 4.
Resolvers[edit | edit source]
Argon supports resolver a.k.a. synchro type feedback devices through Argon resolver adapter device. Due to wide variety of electrical properties of resolvers it is difficult to guarantee optimal operation with all resolvers. However, Argon resolver adapter has been designed to work with typical resolvers that come inside servo motors.
Motor power rating[edit | edit source]
Motor voltages and currents can introduce some limitations to motor output speed and torque but will not cause unsuitability.
- Motor voltage is the limiting factor for maximum speed. For example, if you have a 200 VDC brushed DC servo motor and run it at 115 VAC using Argon, then you can expect to get a speed of 115*1.41*88%*/200V = 71% of motor's rated speed. 88% comes from Argon's effective voltage swing at power outputs (see Argon specifications).
- Motor current is the limiting factor for maximum torque. For example, if you have motor rated for 20A DC and drive's maximum output is 10A DC, then you get 50% of the rated torque.
Smallest suitable motors[edit | edit source]
Argon has high dynamic range torque control which makes it suitable also for very small motors, such as ones with rated current around 300 mA.
Need help determining compatibility?[edit | edit source]
If not sure whether your motor is compatible, you may ask it through Granite Devices support. In inquiry please include details:
- Motor and feedback device manufacturer and part numbers
- Motor and feedback device data sheet or web link to specifications
- Feedback device wiring information (which signals are provided by feedback device)
- Motor current and voltage ratings