Difference between revisions of "Torque mode application specific attributes"
| [checked revision] | [checked revision] |
(Created page with "Some of the GD drives support ''torque mode application specific attributes'' that alter the operation of torque mode. Attributes are controlled by one parameter (parameter ad...") |
(→Supported drives) |
||
| Line 28: | Line 28: | ||
==Supported drives== | ==Supported drives== | ||
*IONI from FW version 1.2.0 | *IONI from FW version 1.2.0 | ||
| − | + | ||
| + | NOTE: Argon has similar feature in racing simulator special firmware. If such feature is needed in non-racing simulator application, please contact us. | ||
[[category:IONI features]] | [[category:IONI features]] | ||
[[category:OpenSimWheel]] | [[category:OpenSimWheel]] | ||
Revision as of 09:24, 10 June 2015
Some of the GD drives support torque mode application specific attributes that alter the operation of torque mode. Attributes are controlled by one parameter (parameter address 920) which is not currently displayed in user Granity interface directly. Instead it can be set and read with this method: Reading and writing an arbitrary parameter with Granity.
Functionality
- Ability to limit motor angle where torque command is obeyed. Generation of torque will stop for motor angles greater than +/-N encoder counts (where 0 angle is the angle after power-on)
- Ability to scale torque setpoint based on analog input (0-5V range sets torque scale between 10-100%)
Usage
Currently this parameter is not visible in Granity but it can be directly accessed by the dialog that pops-up by shortcut Ctrl+P. Usage:
- Open Granity and connect to the drive
- Press Ctrl+P and enter parameter number 920 to one of the left side fields and the calculated parameter value to the right side field
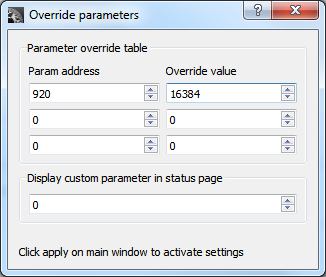
- Click Apply from the main window

Calculation of parameter
This parameter is a bitfield defined as: bits 0-7: option bits, bits 8-29: rotation angle limit (in feedback counts).
Overview:
- 0 = disabled, standard drive operation
- nonzero = calculate value by: round(allowed_rotation_in_counts/256)*256 + modebits
Where modebits is a bitfield defined as:
- bit 0: input scaling. if true, analog input 0-5V sets torque scale to 10-100%. Note: cant use analog input for torque setpoint now.
- bits 1-7: reserved for future use.
Example 1: we want rotation limit of 8000 encoder counts (for each direction) and no scaling input, we use value 7936.
Example 2: we want rotation limit of 8000 encoder counts (for each direction) and torque command scaling input, we use value 7937
Example 3: no rotation limit but just scaling is on: use value 1
Supported drives
- IONI from FW version 1.2.0
NOTE: Argon has similar feature in racing simulator special firmware. If such feature is needed in non-racing simulator application, please contact us.