Torque mode application specific attributes
Some of the GD drives support torque mode application specific attributes that alter the operation of torque mode. Attributes are controlled by one parameter (parameter address 920) which is not currently displayed in user Granity interface directly. Instead it can be set and read with this method: Reading and writing an arbitrary parameter with Granity.
Contents
Functionality[edit | edit source]
- Ability to limit motor angle where torque command is obeyed. Generation of torque will stop for motor angles greater than +/-N encoder counts (where 0 angle is the angle after power-on)
- Ability to scale torque setpoint based on analog input (0-5V range sets torque scale between 10-100%)
Usage[edit | edit source]
Currently this parameter is not visible in Granity but it can be directly accessed by the dialog that pops-up by shortcut Ctrl+P. Usage:
- Open Granity and connect to the drive
- Press Ctrl+P and enter parameter number 920 to one of the left side fields and the calculated parameter value to the right side field
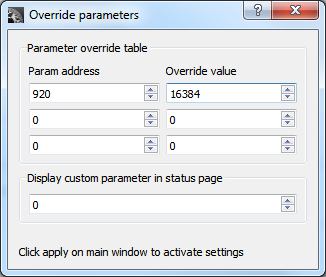
- Click Apply from the main window

Calculation of parameter[edit | edit source]
This parameter is a bitfield defined as: bits 0-7: option bits, bits 8-29: rotation angle limit (in feedback counts).
Overview:
- 0 = disabled, standard drive operation
- nonzero = calculate value by: round(allowed_rotation_in_counts/256)*256 + modebits
Where modebits is a bitfield defined as:
- bit 0: input scaling. if true, analog input 0-5V sets torque scale to 10-100%. Note: cant use analog input for torque setpoint now.
- bits 1-7: reserved for future use.
Example 1: we want rotation limit of 8000 encoder counts (for each direction) and no scaling input, we use value 7936.
Example 2: we want rotation limit of 8000 encoder counts (for each direction) and torque command scaling input, we use value 7937
Example 3: no rotation limit but just scaling is on: use value 1
Supported drives[edit | edit source]
- IONI from FW version 1.2.0
NOTE: Argon has similar feature in racing simulator special firmware. If such feature is needed in non-racing simulator application, please contact us.
Argon simulator wheel special firmware parameters[edit | edit source]
Force feedback system (FFB) edition firmware has two torque mode specific attributes:
- 6110 - limit of motor speed
- This sets maximum power stage duty cycle for motor. Useful for limiting maximum rotation speed of motor in torque model. In special firmware range is 0-4095 where 4095 equals 25% duty cycle in 230 VAC power network and 50% in 115 VAC network. In standard firmware there is no such limit and it allows near 100% duty cycle.
- 6111 - limit of motor rotation
- When value is non-zero, it will limit angle where torque is produced. I.e. value 10000 will allow rotation of +/-10000 encoder counts and outisde of that range, torque will be zero.

Example safety parameters for Argon in Force feedback system (FFB)
In no event the Product Information or parts hereof shall be regarded as guarantee of conditions or characteristics. The Product Information or any part thereof may also not be regarded as a warranty of any kind. No liability of any kind shall be assumed by Author with respect to Product Information or any use made by you thereof, nor shall Author indemnify you against or be liable for any third party claims with respect to such information or any use thereof.
As content of this Wiki may be edited by user community, Granite Devices Oy or it's affiliates do not take any responsibility of the contents of this Wiki. Use information at your own risk. However, Granite Devices staff attempts to review all changes made to this Wiki and keep information trustworthy.
Without written consent, Granite Devices' Products or Intellectual Property shall not be used in situations or installations where living beings, material property, or immaterial property could be harmed by the operation, features or failures of Product. Products may only be used in a way where hazards like moving parts, electric shock, laser radiation, or fire can't be realized even if the content of this Wiki would suggest otherwise.