Overvoltage and undervoltage faults
Drive faulting due to voltage fluctuations in HV DC bus are commonly experienced with servo systems. These faults occur when drive measures a HV DC bus supply voltage that is not within the range defined by Under voltage fault thresholdFUV and Over voltage fault thresholdFOV parameters. The deviation of voltage may be impossible to notice with multimeter as length of these voltage surges can be in millisecond range.
Contents
Overvoltage faults[edit | edit source]
Servo drive attached to a motor can act two ways: energy supply and energy consumer. The energy consumer behavior occurs during decelerations and during fast torque reversals, and this causes current flow from motor to drive power supply capacitors. If the generated energy is not absorbed anywhere, the voltage of HV DC bus capacitors will rise above overvoltage threshold (Over voltage fault thresholdFOV) and trigger an software cleanable overvoltage fault. Overvoltage faults that are caused by returned energy from motor, can be dealt with a regenerative resistor and with optional extra capacitance in HV DC bus.
Scenarios where returned energy is causing the rise of HV DC bus voltage:
- Deceleration of motor speed when there is significant amount of energy stored in mechanical motion (rotating inertia or moving mass). This typically occurs with spindles and linear axes.
- Sudden reversal of torque setpoint. This can generate voltage spike even when motor is standing still. This typically occurs in high bandwidth torque control applications (such as Force feedback system (FFB)). These spikes are very short and an added capacitor to HV DC bus and/or low resistance regenerative resistor can provide a solution.
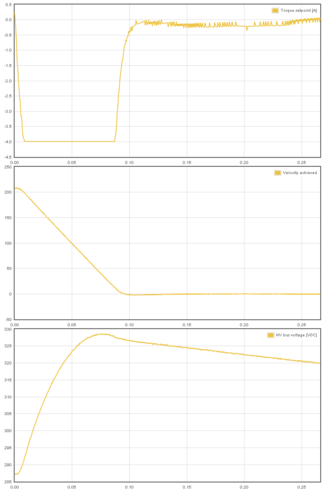
Voltage generation during deceleration of motor (motor current is negative, current is pumped to HV DC bus causing a 40 VDC rise). Top: motor torque command, middle: velocity, bottom: HV DC bus voltage.

Voltage generation during deceleration of motor (motor current is negative, current is pumped to HV DC bus). However, in this case drive is equipped with regenerative resistor and tightly set Over voltage fault thresholdFOV parameter which prevents the significant voltage rise (only 5 VDC rise).
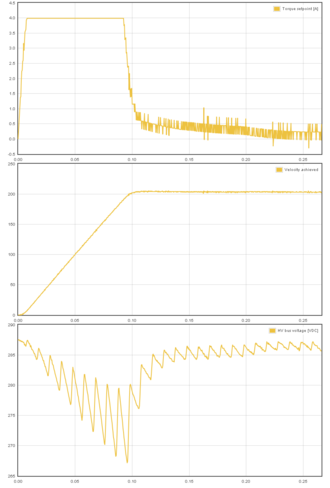
Example of accelerating motor (motor current is positive, power is drawn from HV DC bus which is causing a temporary voltage drop). Rectified 50 Hz mains AC ripple is easily seen in the voltage graph.



Sizing regenerative resistor[edit | edit source]
The needed regenerative resistor value can be calculated by equation:
{kind=link}
$ R_{regen}=\frac{U_{DCBusVoltage}}{I_{PeakMotorCurrent}} $ click to enlarge equations
I.e. if supply voltage is 48VDC and peak current is 10A, then a resistor of 4.8 ohms may be needed to consume all current that is returning from the motor. However, in most practical cases the regenerative current is less than the motor peak current, which allows using higher resistance thus reducing risk of overloading the MOSFET switch operating the resistor. It is recommended to experiment with higher resistor values first, and gradually move to lower resistances if problem persists.
| Before connecting a resistor to drive or drive's motherboard, check from user guides and/or electrical specifications the minimum allowed resistance. Specifications (list may be partial): Argon specifications, IONICUBE electrical specifications, IONICUBE 1X electrical specifications. |
Resistor wattage[edit | edit source]
Resistors generally have two properties: resistance and power dissipation rating. Resistance we have determined in the previous chapter which leaves power to be determined. Determining proper power rating is not very straightforward as estimating the amount of returned energy is difficult without practical experiments (i.e. try one resistor and monitor it's temperature). Only rough starting guide is provided here.
- Small machines, such as desktop machining tools and lightweight mechanical axes
- 0-50W (0W = no resistor may be needed)
- Medium sized machines, such as cast iron machine tool
- 50-200W
- Large and heavy machines (>kilowatt of motor power)
- >200W
- Force feedback systems
- 10-50W, in these systems the energy is mainly from motor inductance and not inertia
Most suitable type of resistors are the ones that can handle high peak power without damage. These are common wire wound power resistors that can handle typically ~10 times more power in short periods than their actual rating.
| If resistor is constantly heating even when machine is not moving, it means that drive's overvoltage fault limit Over voltage fault thresholdFOV is set too low compared to the HV DC bus voltage (drive thinks it's burning regenerative energy, but it's really burning supplied power). Try increasing FOV value or reducing supply voltage until heating stops and resistor stays cool when motors are idle. |
Undervoltage faults[edit | edit source]
Undervoltages come from drop of power supply voltage during surges. The easiest solution is to set undervoltage paramater [FUV] to a lower value and use power supply that doesn't shut down or drop to near zero under power surges. For very short current surges (millisecond range), an added capacitor to HV DC bus might provide a solution.
Using additional capacitor in HV DC bus[edit | edit source]
Variables used in equations[edit | edit source]
- $ t_{duration} $ = time duration in seconds which capacitor should be able to help at maximum current surge
- $ L_{MotorInductance} $ = motor coil inductance in Henrys (use value of Coil inductanceML/1000)
- $ I_{PeakMotorCurrent} $ = motor peak current in Amps (use value of Peak current limitMMC/1000)
- $ U_{MaxVoltageChange} $ = maximum voltage change in HV DC bus during this current surge/peak. I.e. if drive is set to fault at 56V and supply voltage is 48VDC, then 56-48V=8V should be used.
- $ scaler $ = a user chosen value between 0.1 to 1.0. 1.0 is for the worst case where we assume instantaneous torque reversal (rare) and lower values can be used with slower change of torque direction.
| Drive allows voltage few temporarily volts above Over voltage fault thresholdFOV before faulting. In IONI this voltage is about 4 volts. So when FOV is set to 52V, then drive actually faults at 56V |
Surge duration based method[edit | edit source]
For short current surges/spikes, a capacitor added to HV DC bus might provide a solution for filtering out the spikes. Capacitor can be sized by equation:
$ C_{filter}=t_{duration}\frac{I_{PeakMotorCurrent}}{U_{MaxVoltageChange}} $ click to enlarge equations
I.e. if current is 20A, surge duration 0.005 seconds and maximum allowed voltage change (increase or drop) during that surge/spike is 10 VDC, then capacitance becomes $ C_{filter}=0.005s\frac{20A}{10V}=0.01F=10000\mu F $.
Motor inductance based method[edit | edit source]
If the duration is unknown, and we're dealing with fast reversing torque setpoint on a relatively large motor, the capacitor size may be calculated based on the stored energy inside motor inductance:
$ C_{filter}=scaler*L_{MotorInductance}*(\frac{I_{PeakMotorCurrent}}{U_{MaxVoltageChange}})^2 $ click to enlarge equations
I.e. if current is 20A, motor inductance 5 mH (0.005 H) and maximum allowed voltage change in capacitor, and we choose scaler 0.5, then capacitance becomes $ C_{filter}=0.5*0.005H*(\frac{20A}{10V})^2=0.01F=10000\mu F $.
Keeping it practical[edit | edit source]
Targeting low value in max voltage change will increase capacitor size significantly, and may become unpractical. I.e. if supply voltage is 48V and max voltage is 56V, the max voltage change would be only 8V. Reducing supply voltage by few volts, say 44V, the allowed voltage change becomes 12V which yields much smaller required capacitance (in the above inductance based method example this change would make 2.2 times difference).
| Operating drive near maximum supply voltage limit may cause high requirements for overvoltage prevention. Sometimes it may be easier to reduce supply voltage little bit to make more headroom for voltage increase. Many switching power supplies have a trimpot allowing to adjust voltage up/down by few volts. |
See also[edit | edit source]
In no event the Product Information or parts hereof shall be regarded as guarantee of conditions or characteristics. The Product Information or any part thereof may also not be regarded as a warranty of any kind. No liability of any kind shall be assumed by Author with respect to Product Information or any use made by you thereof, nor shall Author indemnify you against or be liable for any third party claims with respect to such information or any use thereof.
As content of this Wiki may be edited by user community, Granite Devices Oy or it's affiliates do not take any responsibility of the contents of this Wiki. Use information at your own risk. However, Granite Devices staff attempts to review all changes made to this Wiki and keep information trustworthy.
Without written consent, Granite Devices' Products or Intellectual Property shall not be used in situations or installations where living beings, material property, or immaterial property could be harmed by the operation, features or failures of Product. Products may only be used in a way where hazards like moving parts, electric shock, laser radiation, or fire can't be realized even if the content of this Wiki would suggest otherwise.