IONICUBE 1X connectors and pinouts
Contents
IONICUBE 1X connectors
- X1.1 and X1.2
- RJ45 connector with SimpleMotion V2 interface. For pinout, seeSimpleMotion V2 port.
- X2
- feedback device connector for motor
- X3
- 9 pin wire terminal for HV DC bus supply, logic voltage supply, regenerative resistor and motor power output.
- X4
- Control and setpoint signal port. Contains also output for motor solenoid holding brake.
- X5
- Card-edge connectors for IONI drive
| Before inserting or removing IONI drives from IONICUBE, remove all power from it and discharge it's capacitors. To discharge remaining energy (~voltage) from capacitors, short circuit GND to HV+ by a conductor and measure that there is no DC voltage left between GND and HV+ terminals. Even few volts left to HV DC bus is known to cause permanent damage to IONICUBE when drives are plugged. |
IONICUBE 1X connectors

Connector layout and naming

Wiring overview. R is regenerative resistor and E is encoder.
Legend
| Color |
|---|
| Supply pin |
| Input pin |
| Output pin |
X3 pinout
This is a wire terminal connector for power input and output
| Pin number | Signal name | Usage |
|---|---|---|
| 1 | GND | Ground |
| 2 | HV+ | Motor power supply, HV DC bus (see IONI drive voltage range spec) |
| 3 | VCC | 24V logic supply |
| 4 | PH1 (PHASE1) | Motor phase 1 |
| 5 | PH2 (PHASE2) | Motor phase 2 |
| 6 | PH3 (PHASE3) | Motor phase 3 |
| 7 | PH4 (PHASE4) | Motor phase 4 |
| 8 | REG | Regenerative resistor output |
| 9 | GND | Ground |
Motor & brake wiring schematics
Note: the images below are drawn for IONICUBE 4 axis version. IONICUBE 1X wiring is equivalent except there is no brake output in the X3. Brake output pin is located in X4.
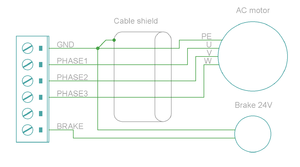
Wiring of three phase AC servo motor. Brake is optional.
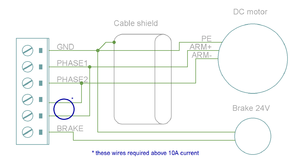
Wiring of Brush-DC servo motor. Brake is optional.
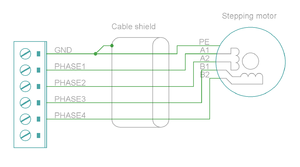
Wiring of two phase stepping motor. Brake can be fitted like in the other examples. Also 6 and 8 wire motors can be wired (the two drive coils connect always to the same PHASE outputs).



| An easy way to verify correctness of two phase stepper connection: unplug the 6 pin connector and then measure resistance between phases 1-2 and 3-4. Multimeter should show the same resistance for both cases (typically 0.1 - 5 ohms). Also when measuring between phases 1-3, 1-4, 2-3 and 2-4, the multimeter should indicate open circuit. |
Regenerative resistor
Regenerative resistor is optional and may be connected between REG and HV+ terminals. The on board transistor is capable of carrying max 10 Amp current on regenerative resistor, so minimum allowed resistance can be calculated from: Rmin=HVvoltage/10. I.e. with 48VDC HV supply, the minimum resistance is 48V/10A = 4.8 Ohms. Suggested resistor power capability is 20-100 W.
| When multiple IONICUBE 1X's are connected to a shared HV supply, then it is typically sufficient to have regenerative resistor only in one IONICUBE 1X as it will help to prevent voltage build-up in the HV supply line. |
X2 pinout
X2 is the feedback device connector of motor
| Pin # | Pin name | Electrical type (in most feedback device modes) | Alternate electrical type (in some feedback device modes) | Connection with various feedback devices |
|---|---|---|---|---|
| Shell | GND | Earth/case | Feedback cable shield | |
| 1 | HALL_W | Digital input W | Hall sensor input, phase W | |
| 2 | HALL_V | Digital input V | Hall sensor input, phase V | |
| 3 | HALL_U | Digital input U | Hall sensor input, phase U | |
| 4 | GND | Encoder supply ground | ||
| 5 | B- | Differential input B- | SinCos input B- | Quadrature encoder (B channel)/SinCos/serial encoder/resolver input |
| 6 | B+ | Differential input B+ | SinCos input B+ | |
| 7 | A- | Differential input A- | SinCos input A- | Quadrature encoder (A channel)/SinCos/serial encoder/resolver input |
| 8 | A+ | Differential input A+ | SinCos input A+ | |
| 9 | 5V_OUT | Encoder supply 5V output | Encoder power supply | |
| 10 | GND | Encoder supply ground | ||
| 11 | GPI3 | Axis negative direction end limit switch (optional) | Connect normally closed (NC) limit switch between this pin and GND pin | |
| 12 | GPI2 | Axis positive direction end limit switch (optional) | Connect normally closed (NC) limit switch between this pin and GND pin | |
| 13 | GPI1 | Axis home switch switch (optional) | Connect normally closed (NC) limit switch between this pin and GND pin | |
| 14 | C- | Differential input C- | Quadrature encoder index channel (Z channel)/serial encoder input | |
| 15 | C+ | Differential input C+ | ||
Examples of feedback device and switch wiring
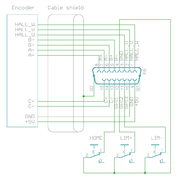
Fully wired port with differential incremental encoder, hall sensors and switches
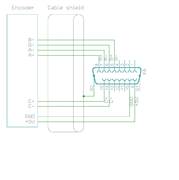
Wiring of differential incremental encoder
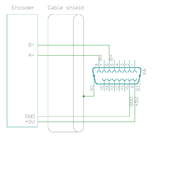
Minimal wiring of incremental encoder (single ended, no index channel)
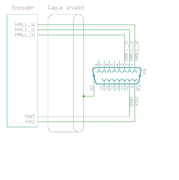
Wiring of Hall sensors only (only torque mode possible)
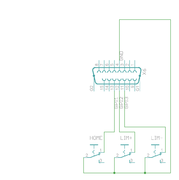
Illustration of wiring limit and home switches. In addition to this, encoder and/or halls are needed.





| In case of single-ended encoder, connect encoder's A, B, Z only to drive's A+, B+ and C+ and leave drive's A-, B- and C- unconnected. |
| With differential Hall sensor (which provides U+, U-, V+, V-, W+ and W-, connect only sensor's U+, V+ and W+ to drive's HALL_U/V/W. |
| Never connect sensor negative outputs (A-/B-/C-/U-/V-/W-) to GND. Connect them to drive's A-/B-/C- or leave unconnected. |
| Feedback devices with differential signaling may use varying naming schemes of signal pairs. For example differential signal X (which contains two electrical wires) may be denoted as: X+ and X-, or X and \X or X and X. In this Wiki we mark them X+ and X-. Some Fanuc encoders have quadrature signals named as PCA, /PCA, PCB, /PCB, PCZ and /PCZ which are equivalent to A, B and Z signal pairs. |
X4 pinout
| This section is unfinished. Don't use until this notice is removed. |
X4 is main control and setpoint signal port consisting Enable input signal, Fault output signal, pulse and direction/quadrature/PWM setpoint inputs and digital outputs for home switch status. X4 is directly wired to conform most common parallel port style pulse & direction CNC controllers.
| Pin number in header | Signal name | Typical usage | Signal name | Typical usage | |
|---|---|---|---|---|---|
| 1 | GND | Ground | 2 | 5V_OUT | 5V output for optional external circuity |
| 3 | HSIN2 | Depending on setpoint mode, can be either:
|
4 | HSIN1 | Depending on setpoint mode, can be either:
|
| 5 | ANAIN+ | +/-10V analog setpoint input2 | 6 | ANAIN- | +/-10V analog setpoint input2 |
| 7 | GPI2 | Enable positive feed (also in X2)1 | 8 | GPI1 | Home switch input (also in X2)1 |
| 9 | GPI4 | Clear faults1 | 10 | GPI3 | Enable negative feed (also in X2)1 |
| 11 | REGEN_OUT | Regenerative resistor power switch state (redundant, IONICUBE 1X has internal power switch) | 12 | GPI5 | Start homing1 |
| 13 | MECH_BRAKE_OUT | Mechanical holding brake output3 | 14 | GPO5 | Reserved for future use1 |
| 15 | GPO4 | Limit switch output | 16 | GPO3 | Fault on any axis or E-stop (active low)1 |
| 17 | GPO2 | Tracking error warning1 | 18 | GPO1 | Servo ready1 |
| 19 | STO2 | Safe torque off input (this pin also present in X14) | 20 | ENABLE | Enable drive (with or without chargepump) (this pin also present in X14) |
1) For detailed pin function and alternative functions in various modes, refer to IONI connector pinout
2) Setpoint voltage is measured from the difference of voltage potentials between ANAIN+ and ANAIN-. Both ANAIN inputs must always lie within +/-12V from GND (meaning that controller's zero voltage reference, i.e. GND must be connected to the GND if drive to prevent voltage potentials from floating.
3) This output can directly drive a 24V solenoid brake (max 500mA) if VCC is supplied by 24 volts. In such case, connect brake wires between MECH_BRAKE_OUT and VCC.
4) The same pin is routed also to X1 connectors. Use only either ENABLE/STO2 pins of X4 or X1, not both.
| Connect X4 directly only to 3.3V or 5V logic systems. For 24V logic, see chapter below. |
X1 connector
X1 connectors are for SimpleMotion V2 bus which is used for drive configuration with Granity software and control over a multidrop capable serial data link. For pinout, see SimpleMotion V2 port.
| Never connect an Ethernet to X1. While it uses similar connector and cabling, it is electrically incompatible with Ethernet. Devices may be permanently damaged by mixing Ethernet and SimpleMotion V2. |
| Do now wire SimpleMotion V2 ports with crossover RJ45 cables (see details). Always use straight/non-crossover patch cables. If unsure about what is the type of your RJ45 cable, don't use it. |
Using 24 Volt control signals
As many industrial environments use 24V signaling for logic, interfacing IONICUBE 1X has been designed to accept these voltages with small adjustments.
TODO. This section updated later.
Dimensions and mounting
IONICUBE 1X can be mounted by screws to a base or with optional DIN rail clips to a standard DIN rail.
To mount in DIN rail, obtain 2 pcs of Phoenix Contact part number 1201578. Such part is available from many distributors including Digikey 277-2296-ND

Dimensions and mounting hole locations
In no event the Product Information or parts hereof shall be regarded as guarantee of conditions or characteristics. The Product Information or any part thereof may also not be regarded as a warranty of any kind. No liability of any kind shall be assumed by Author with respect to Product Information or any use made by you thereof, nor shall Author indemnify you against or be liable for any third party claims with respect to such information or any use thereof.
As content of this Wiki may be edited by user community, Granite Devices Oy or it's affiliates do not take any responsibility of the contents of this Wiki. Use information at your own risk. However, Granite Devices staff attempts to review all changes made to this Wiki and keep information trustworthy.
Without written consent, Granite Devices' Products or Intellectual Property shall not be used in situations or installations where living beings, material property, or immaterial property could be harmed by the operation, features or failures of Product. Products may only be used in a way where hazards like moving parts, electric shock, laser radiation, or fire can't be realized even if the content of this Wiki would suggest otherwise.