Configuring IONI drive in SimuCUBE
Each SimuCUBE system consists one IONI Servo & Stepper Drive that is controls the motor of Force feedback system (FFB). This page helps setting correct parameters to IONI drive.
Contents
Preparations
- Download Granity software
- Connect SimuCUBE X4 to PC with USB cable
- Connect motor to connector X1 and motor feedback device to X16 as instructed earlier
- Have E-stop switch unconnected or open until configuration is complete
- Power on SimuCUBE
- Wait until windows has recognized the device and installed driver
- Start Granity software
- Connect to IONI by clicking Connect to drive button
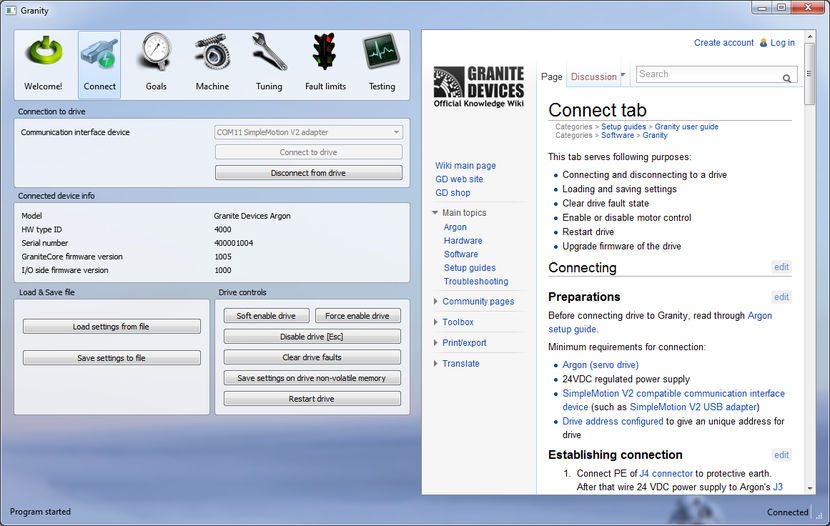
- Once list of found devices pop-up, select the IONI drive and click Open

If everything went fine, we are now connected to IONI and change it's settings. If not, see SimuCUBE troubleshooting and Device connection troubleshooting.
Upgrading IONI firmware
First it is recommended to upgrade to the latest IONI firmware:
- Download latest IONI firmware from IONI firmware releases
- Follow instructions of Granity user guide/Uploading a firmware
- Connect again into drive by choosing Connect to drive just like we did first time
- Proceed to Loading motor configuration file or Configuring motor manually chapter
Loading motor configuration file
If you have pre-made configuration file made to your motor and SimuCUBE, you may follow this chapter to load it in the IONI and skip the next chapter Configuring motor.
- Click Load settings from file
- Select the file and open it
- Click Save settings to drive non-volatile memory and answer yes to questions of applying settings and restarting drive afterwards
- All done, proceed to Testing settings chapter
Configuring motor manually
All settings except the one mentioned here should be kept at their factory defaults. If unsure which settings are factory defaults, then repeat firmware upgrade procedure and tick the Reset device to factory state checkbox before uploading the firmware.
| Have E-stop switch pressed (open circuit) during configuration to avoid unexpected motion |
Following settings are constant and always required with SimuCUBE:
| Granity tab | Parameter | Value | Notes |
|---|---|---|---|
| Goals | Control modeCM | Torque control | |
| Goals | Electrical interfaceCEI | SimuCUBE | |
| Goals | Setpoint inputCRI | Pulse Width Modulation | Note: Leave this to Serial only if you're configuring for the first time (and set this to Pulse Width Modulation after testing (later chapter on this page) if testing was successful) |
| Goals | Enable direction inputCED | On (ticked) | |
| Fault limits | Over voltage fault thresholdFOV | 49V | Assuming 48 VDC regulated power supply |
| Fault limits | Under voltage fault thresholdFUV | 30V | Assuming 48 VDC regulated power supply |
| Fault limits | Over current toleranceFOC | High | Change this only if over current fault problems occur with the motor |
| Machine | Maximum peak powerMPP | Your power supply rating in watts | Granite Devices SimuCUBE systems are have one of these ratings: 320W, 480W or 720W. Use value from your model. If under voltage faults occur, try reducing this value little bit (like 10-30W). |
Motor parameters depend on the attached motor type and specifications. Refer your motor manufacturer's data sheet to get the correct values in the following fields:
| Granity tab | Parameter | Value | Notes |
|---|---|---|---|
| Machine | Motor typeMT | 3 phase AC or BLDC | |
| Machine | Pole countMPC | 8 | 8 is a typical value, however 4, 6 are common as well |
| Machine | Continuous current limitMCC | Maximum motor continuous current | Most AC motors specify current as RMS value. Value in this field is entered as Peak value of sine. To covert RMS current to peak value of sine, multiply it by 1.41. |
| Machine | Peak current limitMMC | Motor peak current rating | Most AC motors specify current as RMS value. Value in this field is entered as Peak value of sine. To covert RMS current to peak value of sine, multiply it by 1.41.
This defines the maximum torque that system will produce. For safety reasons, it is recommended to set this value to 20% of motor specified value until system operation has been verified. |
| Machine | Coil resistanceMR | Motor phase-to-phase resistance (from motor data sheet) | |
| Machine | Coil inductanceML | Motor phase-to-phase inductance (from motor data sheet) | |
| Machine | Feedback deviceFBD | Motor feedback device type | If unsure, choose Quadrature encoder 1 |
| Machine | Feedback device resolutionFBR | Encoder resolution in pulses per revolution | Typical motors have 2500 PPR or 5000 PPR encoder |
| Machine | Invert feedback directionFBI | Disabled/Enabled | Try first without enabling this, and later with inverting this setting if motor testing section shows problems |
| Tuning | Torque bandwidth limitTBW | 680 Hz | Sets maximum torque bandiwdth of motor. Values between 220 to 680 Hz recommended for FFB systems. |
After all parameters have been set, click Apply settings and go to Connect tab and click Save settings on drive non-volatile memory. Many parameter changes need restarting of the drive to activate new settings. If unsure, just click Restart drive and connect again.
Testing settings
To test settings first time, it is advised to change Setpoint inputCRI temporarily to Serial only to avoid unexpected motion. After changing any parameter (including CRI),click Apply settings button to activate the change.
Testing procedure:
- Have Granity connected to drive and go to Testing tab
- Make sure that nothing is blocking motor rotation and motor is rigidly mounted (unexpected and strong rotation or vibration might occur)
- Release E-stop switch to activate the drive
- Motor should start initializing by swinging back and forth with decreasing amplitude and then become in rest without any torque or shaft holding force
- Manually change torque setpoint by clicking Increment by TSP1 several times. This will increase torque command setpoint on each click. Typically motor should definitely rotate when setpoint is increased above value 5000. Observe motor:
- Motor should start rotating after produced torque exceeds static friction. If motor spins, test has passed! Set setpoint to zero and proceed to finalizing settings.
- If motor does not start rotating, check device status and fault registers in the Testing tab and check SimuCUBE troubleshooting
- If motor starts holding position (becomes stiff to turn) and has "bumps" if forced to turn anyways, then one of following settings need attention:
- FBI - try inverting this checkbox value and try again
- If FBI didn't help, ensure that MPC and FBR are exactly correct values. See Determining motor pole count if not sure about pole count.
Finalizing settings
To finalize setup, change Setpoint inputCRI to Pulse Width Modulation, Apply and save settings to drive. For additional settings and tuning of force feedback effects feeling, you may adjust additional Granity parameters such as Torque mode effects in Tuning tab (click Show advanced settings).
| When CRI is set to anything but Serial setpoint, IONI drive starts following torque command from external inputs. This means that the firmware loaded into SimuCUBE is able to rotate and send torque command. Beware unexpected rotation when changing this setting. |
After SimuCUBE all settings have been configured and verified to work, you might want to become back to the settings and adjust motor current limits (MMC and MCC) to increase or adjust maximum torque of motor.
| Read next |
In no event the Product Information or parts hereof shall be regarded as guarantee of conditions or characteristics. The Product Information or any part thereof may also not be regarded as a warranty of any kind. No liability of any kind shall be assumed by Author with respect to Product Information or any use made by you thereof, nor shall Author indemnify you against or be liable for any third party claims with respect to such information or any use thereof.
As content of this Wiki may be edited by user community, Granite Devices Oy or it's affiliates do not take any responsibility of the contents of this Wiki. Use information at your own risk. However, Granite Devices staff attempts to review all changes made to this Wiki and keep information trustworthy.
Without written consent, Granite Devices' Products or Intellectual Property shall not be used in situations or installations where living beings, material property, or immaterial property could be harmed by the operation, features or failures of Product. Products may only be used in a way where hazards like moving parts, electric shock, laser radiation, or fire can't be realized even if the content of this Wiki would suggest otherwise.