Revision as of 17:50, 21 October 2013
This page lists official functional, electrical and physical specifications of the
ARGON Servo Drive.
Main functionality
| Function |
Description
|
| Servo motor drive |
Closed loop control of various types of servo motors by sinusoidal field oriented control with dead-time distortion correction and high dynamic range torque control.
- Support over 97% of all the servo motors below 2 kW in the market
- Synchronous AC & BLDC motors
- Sinusoidal and trapezoidal commutated
- SPM (Surface Permanent Magnet) and IPM (Internal Permanent Magnet) types
- Brush DC motors
- Linear motors
- Iron core
- Ironless (with external inductive filter)
|
| Control modes |
- Torque control
- Velocity/speed control
- Position control
|
| Closed loop |
Cascaded control loops (PIV):
- Torque / current control, update frequency 17.5 kHz
- Velocity control, update frequency 2.5 kHz
- Position control, update frequency 2.5 kHz
Dual-loop feedback support planned as firmware upgrade
|
| Feed-forwards |
Feed-forwards working in velocity & position control modes:
- Acceleration (inertia canceling) feed-forward
- Velocity (friction canceling) feed-forward
|
| Homing |
Integrated homing function for position control mode:
- Sensorless hard-stop homing
- Home switch search
- Index pulse search
- Soft position limits (eliminate limit switches)
|
| Setpoint signal |
See setpoint signal / reference inputs list
|
| Feedback devices |
See feedback devices list
|
| Safety |
- Safe torque off with 3-way redundancy
- Stopping motor on errors
- Tracking error (velocity & position)
- Over speed error
- Limit switch
- DC motor runaway prevention on feedback loss
- Communication error detection
|
| Protections |
- Over current
- Short circuit (phase-to-phase)
- I2t motor thermal protection
- Over & under voltage
- Over temperature
|
| Commissioning |
|
| Approvals |
CE (LVD & EMC)
|
Mechanical
| Property |
Value |
Units
|
| Dimensions (with wall mounting tabs)¹ |
51×197×127 (W×H×D) |
mm
|
| Dimensions (excluding wall mounting tabs)¹ |
51×177×127 (W×H×D) |
mm
|
| Weight |
0.88 |
kg
|
| Case materials |
Steel (cover), aluminum (heat sink) |
|
¹) Wall mounting tabs are fixed part of enclosure
Environment
| Property |
Value |
Units
|
| Operating temperature |
10-70 |
°C
|
| Storage temperature |
-30-90 |
°C
|
| Humidity |
0-95 non-condensing |
%
|
| Power dissipation |
2-100¹ |
W
|
¹) Power dissipation is output current and input voltage related.
Power supply
| Supply² |
Input voltage |
Input current typ |
Input current max
|
| Logic power |
24 VDC +/- 10% |
0.1 - 0.4 A |
0.5 A
|
| Motor power³ |
85 - 264 VAC 50/60 Hz |
0 - 15 A¹ |
26 A¹
|
| 84 - 380 VDC |
0 - 15 A¹ |
26 A¹
|
¹) Estimating true current or power consumption based on this table may be difficult as current demand typically varies greatly and and almost completely depends on motor load conditions.
²) Both logic and motor supplies are required.
³) Features internal inrush current limiter
Motor output
| Property |
Value |
Units |
Remarks
|
| Supported motors |
AC, BLDC, DC, Linear |
|
Permanent magnet motors only
|
| Continuous output current |
0-10 |
A (peak value of sine) |
User settable limit
|
| Peak output current |
0-15 |
A (peak value of sine) |
Duration 1 sec, then returned to continuous limit. User settable current limit.
|
| Maximum effective motor phase output voltage |
Max 88% of input AC supply voltage AC or 124% DC. |
|
I.e. for 230 VAC drive supply, max motor output is 202 VAC (AC/BLDC/Linear) or 285 VDC (brush DC).
|
| Switching frequency |
17.5 |
kHz |
|
| Maximum modulation depth |
88 |
% |
Maximum effective output is 88% of HV DC bus voltage.
|
| Torque control bandwidth (typ.) |
1-3.3 |
kHz |
Motor coil dependent
|
| Torque control cycle time |
57.1 |
µs |
|
| Position & velocity control cycle time |
400 |
µs |
|
| Power conversion efficiency |
90-95 |
% |
Under typical conditions
|
| Motor inductance range @ 230 VAC |
1.4-25 |
mH |
|
| Motor inductance range @ 115 VAC |
0.7-25 |
mH |
|
| Motor power range |
0.05 - 1.5 |
kW |
|
| AC commutation frequency |
0-400 |
Hz |
|
Regenerative resistor
| Property |
Value |
Units
|
| Maximum current |
6 |
A
|
| Series fuse |
8 |
A
|
| Minimum allowed resistance @ 230 VAC supply |
63 |
Ω
|
| Minimum allowed resistance @ 115 VAC supply |
35 |
Ω
|
| Resistor power dissipation |
0-2400¹ |
W
|
¹) Power dissipation depends on how much system's kinetic energy is directed to the resistor
Feedback devices
Status of feedback device support
| Feedback device type |
Status |
Electrical interface
|
| Quadrature incremental encoder |
Standard feature |
Differential 3-5.5V (RS422), Single ended 3-5.5V (CMOS,TTL,open collector)
|
| Hall sensors |
Standard feature |
Single ended 3-5.5V (CMOS,TTL,open collector). Differential signals accepted.
|
| Analog SinCos encoder |
Under development¹ |
1 V p-p, 12 bits sampling
|
| Resolver/synchro |
Under development¹ |
10 kHz excitation
|
| Serial SSI encoder |
Planned¹ |
RS422/RS485
|
| Serial BiSS encoder |
Planned¹ |
RS422/RS485
|
| Tachogenerator |
Planned¹
|
¹) Supported already by hardware, usage possible after firmware upgrade
Quadrature encoder electrical properties
| Property |
Value |
Units |
Remarks
|
| Encoder count rate |
0-4 |
MHz |
After 4x decoding, digitally filtered
|
| Supply voltage |
4.8-5.2 |
V |
Supplied from drive
|
| Supply current |
0-500 |
mA |
Supplied from drive
|
Setpoint signal / reference inputs
| Setpoint signal type |
Status |
Electrical interface
|
| Analog |
Standard feature |
Up to +/-10V or any lower range
|
| Pulse and direction |
Standard feature |
Up to 4 MHz step rate, 5V signaling
|
| Quadrature |
Standard feature |
Up to 4 MHz count rate, 5V signaling
|
| PWM |
Standard feature |
3-30 kHz PWM carrier frequency
|
| Serial communication |
Standard feature |
SimpleMotion V2 RS485 based real-time serial bus with open source SDK
|
| Stand-alone operation or custom setpoint signal |
User implementable |
May be implemented in the Argon open source firmware
|
| EtherCAT |
Planned |
Realized with add-on board
|
Inputs / outputs
List of I/O's
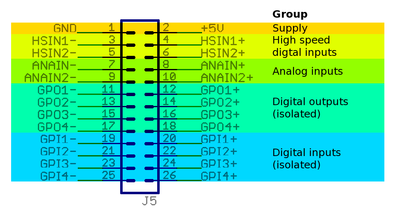
J5 I/O connector pin groups. In addition to J5, J2 has digital I/O's for enable and
STO- Isolated digital inputs (4 channels) - used for limit & home switches and clear faults signal ¹
- Isolated digital outputs (4 channels) - used for status indication ¹
- Differential analog inputs (2 channels) - used as Analog setpoint ¹
- Differential digital inputs (2 channels) - used for pulse/direction or second encoder ¹
- Digital inputs (3 channels) - used for safe torque off and drive enable
- Digital output (1 channel) - used for motor solenoid brake
¹) Functions may be altered by modifying the Argon open source firmware
Electrical characteristics
For detailed specifications, see I/O electrical interfacing and pinout & wiring.
| Property |
Typical value |
Maximum rating |
Units
|
| Protections (all I/O lines) |
overvoltage, ESD, short circuit, reverse polarity
|
| Isolated digital input (GPIx) logic 1 voltage |
3-24 |
25.5 |
V
|
| Isolated digital input (GPIx) logic 0 voltage |
0-1.3 |
|
V
|
| Isolated digital output (GPOx) voltage |
0-24 |
25.5 |
V
|
| Isolated digital output (GPOx) current |
0-10 |
10 |
mA
|
| High speed digital input (HSINx) voltage range |
2.7-5.5 |
6.0 |
V
|
| Analog input input (ANAINx) voltage range |
±10 |
±25 vs GND |
V
|
| Analog input input (ANAINx) resolution |
12 |
|
bits
|
| Enable input input logic 1 voltage |
20-24 |
25.5 |
V
|
| STO input input logic 1 voltage |
20-24 |
25.5 |
V
|
| Motor brake voltage |
12-24 |
25.5 |
V
|
| Motor brake load current |
0-0.5 |
0.7 |
A
|
¹) Power dissipation is output current and input voltage related.
Communication
| Property |
Value |
Units
|
| Communication protocol |
SimpleMotion V2 |
|
| Default bitrate |
460800 |
BPS
|
| Maximum number of Argon devices chained in a single bus |
15 |
pcs
|
| Command throughput |
Up to 10000 |
Commands/s
|
Safety
| Feature |
Properties |
Remarks
|
| Safe torque off |
- 3-way redundancy with 2 physical STO inputs
- Cut AC input by safety relay @ STO1 input
- Cut power stage gate voltage @ STO2 input
- Disable power stage by software @ STO2 input
|
STO1 safe up to 6 A RMS input current
|
| Control error detection |
- Tracking error (velocity & position)
- Over speed error
- Limit switch
- DC motor runaway prevention on feedback loss
- Communication error
|
|
| Electrical safety |
- Galvanic isolation between I/O side and power side
- Internal fuse on AC input
- MOV based transient overvoltage protection
- Earth leakage current typ. < 0.5 mA
- ESD protection on all pins
- Surge protection on AC & DC power inputs
|
Galvanic isolation on J1, J2, J3 and J5 connectors against J4 with live AC mains voltages
|
| Overload safety |
- Over current
- Short circuit (phase-to-phase)
- I2t motor thermal protection
- Over & under voltage
- Drive over temperature
|
|
Warnings
| Exceeding ratings may affect drive operation and cause instability or even damage the drive or other equipment. Damaged equipment may pose danger to users. |
